xacro是为了解决在编写urdf文件过程中,出现的标签内容重复,但又不得不去写。一些值的计算有依赖的问题。为了和urdf文件区分,我们定义的模型文件名后缀为.xacro。从功能的角度来说,
xacro提供了属性定义,数学运算,条件判断和宏定义等功能。注意:必须在robot标签中加入
xmlns:xacro="http://www.ros.org/wiki/xacro"属性!!该文件中注释不能用中文!!!
此文用于记录URDF模型中最重要和最常用的两个标签,文章的内容大部分都来自官方
http://wiki.ros.org/urdf/XML/link
http://wiki.ros.org/urdf/XML/joint
对于各个标签的理解和使用,不定时更新。
单独使用OpenCV的时候遇到了之前因为安装 ROS 而导致的一些坑点。
故记录下来。
问题描述
使用了
Anaconda的虚拟环境,并且确认已经安装过 OpenCV运行 Python,直接 xxx(不可描述)。
1 |
Traceback (most recent call last): |
Service通讯机制
Service通讯分为client端和server端。
client端负责发送请求(Request)给server端。server端负责接收client端发送的请求数据。server端收到数据后,根据请求数据和当前的业务需求,产生数据,将数据(Response)返回给client端。
Service通讯的特点:
- 同步数据访问
- 具有响应反馈机制
- 一个server多个client
- 注重业务逻辑处理
环境说明
ROS版本:ROS Kinetic Kame
Ubuntu版本:Ubuntu 16.04.6 LTS,(
lsb_release -a)Python版本:Python 2.7.12
CMake 版本:3.5.1
前文已经讲过
以上是这篇文章的基础
以下所有文件都创建在 ws 的工作空间下
环境说明
ROS版本:ROS Kinetic Kame
Ubuntu版本:Ubuntu 16.04.6 LTS,(
lsb_release -a)Python版本:Python 2.7.12
CMake 版本:3.5.1
前文已经讲过
以上是这篇文章的基础
以下所有文件都创建在 ws 的工作空间下
ros的基础架构
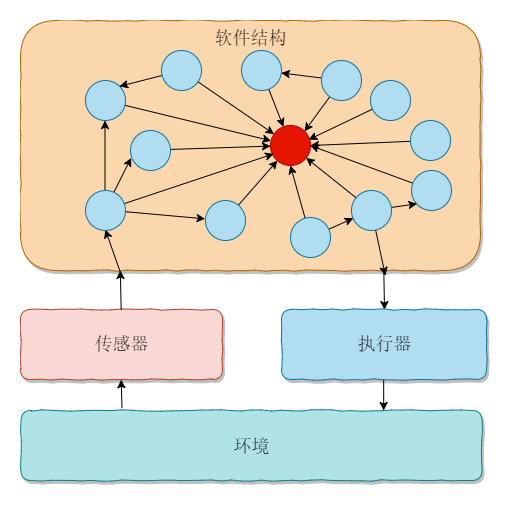
ROS 项目在部署运行的过程中,大致分为4个部分:
- 环境
- 软件环境
- 硬件环境
- 执行器
- 给操作系统发送一些指令,以此来控制硬件执行相应操作
- 传感器
- 传感器接收外部环境给的输出,反馈给相应的软件
- 软件结构
- ros 一个可执行程序,就是一个节点
- ros master用来管理各个节点
消息(msg)和服务(srv)总览
- 消息(msg)就是一个描述 ROS 中所使用的消息类型的简单文本,后缀以
.msg命名。 - 服务(srv)就是一个描述 ROS 服务数据的文本,后缀以
.srv命名。它包含两个部分:request和response
msg文件存放在 package 目录的 msg 目录下,srv 文件存放在 package 目录的 srv 目录下。
修改自 ros 官方 wiki
CMakeLists.txt 是 CMake 构建系统的输入,用于构建软件包。catkin 的
CMakeLists.txt 带有一些其它的约束
总体结构
-
所需的 CMake 版本。(
cmake_minimum_required) -
包名称。(
project) -
查找构建所需的 CMake或 Catkin 软件包。(
find_package) -
启动 Python 模块支持。(
catkin_python_setup) -
消息、服务、动作生成器。(
add_message_files,add_service_files,add_action_files) -
调用消息、服务、动作生成。(
generate_messages) -
指定包构建信息导出。(
catkin_package) -
添加要构建的库或可执行文件。(
add_library,add_executable,target_link_libraries) -
测试构建。(
catkin_add_gtest) -
安装规则。(
install)
1 / 2