哈里斯角点检测
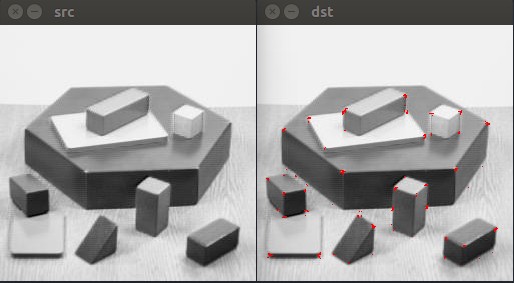
克里斯·哈里斯(Chris Harris)和迈克·史蒂芬斯(Mike Stephens)在1988年的论文《组合式拐角和边缘检测器》(《A Combined Corner and Edge Detector》)中做了一次找到这些拐角的尝试,所以现在将其称为哈里斯拐角检测器。这篇论文把这个简单的想法变成了数学形式。它基本上找到了在所有方向上位移的强度差异。
1 |
cornerHarris(src, dst, blockSize, ksize, k) |
src:必须是单通道灰度图dst:返回类型是CV_32FC1,大小与src相同。blockSize:角点检测考虑的领域大小,int类型kszie:Sobel算子的大小,int类型k:自由度参数,值越小检测出的结果越多。double类型
1 |
Mat gray, points; |
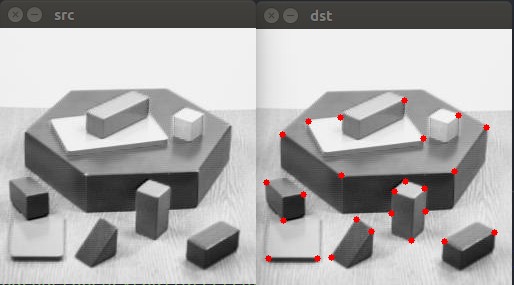
史-托马斯角点检测
J. Shi 和 C. Tomasi 在其论文 《Good Features to Track》 中对其进行了小的修改,与Harris Corner Detector相比,该方法表现出出更好的结果。
1 |
goodFeaturesToTrack(src, corners, maxCorners, qualityLevel, minDistance) |
src:8位单通道或者32位浮点单通道图像corners:检测到的角的点集,类型为vector<Point>maxCorners:最大角数qualityLevel:最低接收的质量百分比minDistance:点之间的最小距离
1 |
Mat gray; |
完整代码:https://github.com/AskeyNil/BlogCode/blob/master/OpenCV/cc/CornerDetector.cc